 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYing Jiang
Comprehensive Survey of Model Compression and Speed up for Vision Transformers
Apr 16, 2024
Vision Transformers (ViT) have marked a paradigm shift in computer vision, outperforming state-of-the-art models across diverse tasks. However, their practical deployment is hampered by high computational and memory demands. This study addresses the challenge by evaluating four primary model compression techniques: quantization, low-rank approximation, knowledge distillation, and pruning. We methodically analyze and compare the efficacy of these techniques and their combinations in optimizing ViTs for resource-constrained environments. Our comprehensive experimental evaluation demonstrates that these methods facilitate a balanced compromise between model accuracy and computational efficiency, paving the way for wider application in edge computing devices.
VR-GS: A Physical Dynamics-Aware Interactive Gaussian Splatting System in Virtual Reality
Jan 30, 2024As consumer Virtual Reality (VR) and Mixed Reality (MR) technologies gain momentum, there's a growing focus on the development of engagements with 3D virtual content. Unfortunately, traditional techniques for content creation, editing, and interaction within these virtual spaces are fraught with difficulties. They tend to be not only engineering-intensive but also require extensive expertise, which adds to the frustration and inefficiency in virtual object manipulation. Our proposed VR-GS system represents a leap forward in human-centered 3D content interaction, offering a seamless and intuitive user experience. By developing a physical dynamics-aware interactive Gaussian Splatting in a Virtual Reality setting, and constructing a highly efficient two-level embedding strategy alongside deformable body simulations, VR-GS ensures real-time execution with highly realistic dynamic responses. The components of our Virtual Reality system are designed for high efficiency and effectiveness, starting from detailed scene reconstruction and object segmentation, advancing through multi-view image in-painting, and extending to interactive physics-based editing. The system also incorporates real-time deformation embedding and dynamic shadow casting, ensuring a comprehensive and engaging virtual experience.Our project page is available at: https://yingjiang96.github.io/VR-GS/.
Gaussian Splashing: Dynamic Fluid Synthesis with Gaussian Splatting
Jan 27, 2024We demonstrate the feasibility of integrating physics-based animations of solids and fluids with 3D Gaussian Splatting (3DGS) to create novel effects in virtual scenes reconstructed using 3DGS. Leveraging the coherence of the Gaussian splatting and position-based dynamics (PBD) in the underlying representation, we manage rendering, view synthesis, and the dynamics of solids and fluids in a cohesive manner. Similar to Gaussian shader, we enhance each Gaussian kernel with an added normal, aligning the kernel's orientation with the surface normal to refine the PBD simulation. This approach effectively eliminates spiky noises that arise from rotational deformation in solids. It also allows us to integrate physically based rendering to augment the dynamic surface reflections on fluids. Consequently, our framework is capable of realistically reproducing surface highlights on dynamic fluids and facilitating interactions between scene objects and fluids from new views. For more information, please visit our project page at \url{https://amysteriouscat.github.io/GaussianSplashing/}.
Binary structured physics-informed neural networks for solving equations with rapidly changing solutions
Jan 25, 2024Physics-informed neural networks (PINNs), rooted in deep learning, have emerged as a promising approach for solving partial differential equations (PDEs). By embedding the physical information described by PDEs into feedforward neural networks, PINNs are trained as surrogate models to approximate solutions without the need for label data. Nevertheless, even though PINNs have shown remarkable performance, they can face difficulties, especially when dealing with equations featuring rapidly changing solutions. These difficulties encompass slow convergence, susceptibility to becoming trapped in local minima, and reduced solution accuracy. To address these issues, we propose a binary structured physics-informed neural network (BsPINN) framework, which employs binary structured neural network (BsNN) as the neural network component. By leveraging a binary structure that reduces inter-neuron connections compared to fully connected neural networks, BsPINNs excel in capturing the local features of solutions more effectively and efficiently. These features are particularly crucial for learning the rapidly changing in the nature of solutions. In a series of numerical experiments solving Burgers equation, Euler equation, Helmholtz equation, and high-dimension Poisson equation, BsPINNs exhibit superior convergence speed and heightened accuracy compared to PINNs. From these experiments, we discover that BsPINNs resolve the issues caused by increased hidden layers in PINNs resulting in over-smoothing, and prevent the decline in accuracy due to non-smoothness of PDEs solutions.
Application Layer Definition and Analyses of Controller Area Network Bus for Wire Harness Assembly Machine
Aug 31, 2006
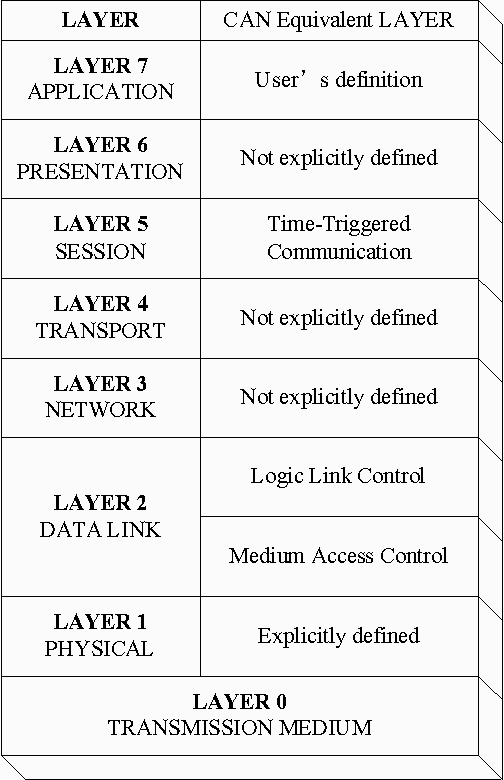
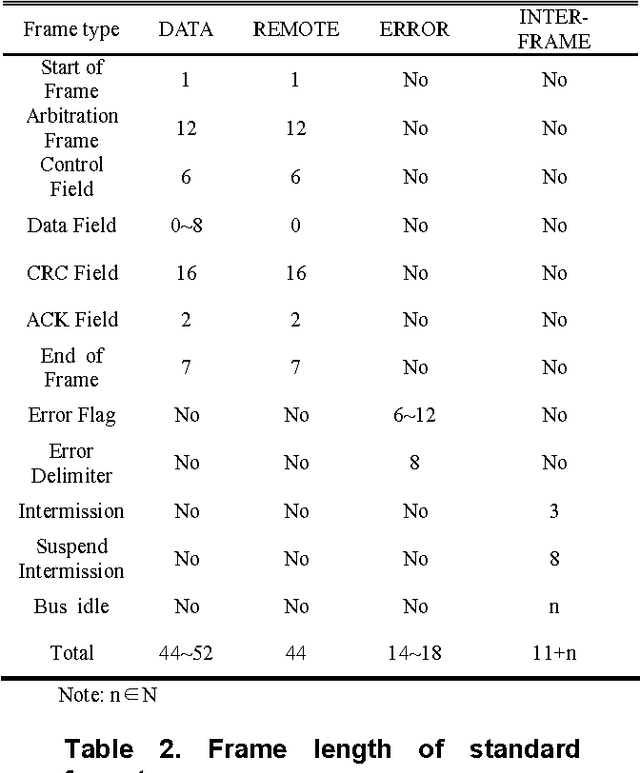
With the feature of multi-master bus access, nondestructive contention-based arbitration and flexible configuration, Controller Area Network (CAN) bus is applied into the control system of Wire Harness Assembly Machine (WHAM). To accomplish desired goal, the specific features of the CAN bus is analyzed by compared with other field buses and the functional performances in the CAN bus system of WHAM is discussed. Then the application layer planning of CAN bus for dynamic priority is presented. The critical issue for the use of CAN bus system in WHAM is the data transfer rate between different nodes. So processing efficient model is introduced to assist analyzing data transfer procedure. Through the model, it is convenient to verify the real time feature of the CAN bus system in WHAM.